|
I am a Researcher at INSAIT in Sofia, Bulgaria, working under the supervision of Prof. Luc Van Gool. My research focuses on 3D scene understanding with a particular emphasis on indoor environments. Previously, I earned my Master of Research in AI and Machine Learning at Imperial College London, where I explored computer vision, camera relocalization, and geometry-based machine learning under the guidance of Dr. Tolga Birdal. I also hold a B.Sc. in Automation from Beijing Institute of Technology. Additionally, I am an active member of AnySyn3D, a research group dedicated to advancing 3D technologies. My current research interests include 3D computer vision, NeRFs, Gaussian Splatting, and comprehensive scene understanding.
I was a computer vision researcher at DISCOVER Lab, Institute of AI Industry Research, Tsinghua University, working on Neural Radiance Fields, Scene Understanding and Camera Relocalization, supervised by Prof. Zhao Hao.
|

|
 |
|||
 |
 |
 |
|
|
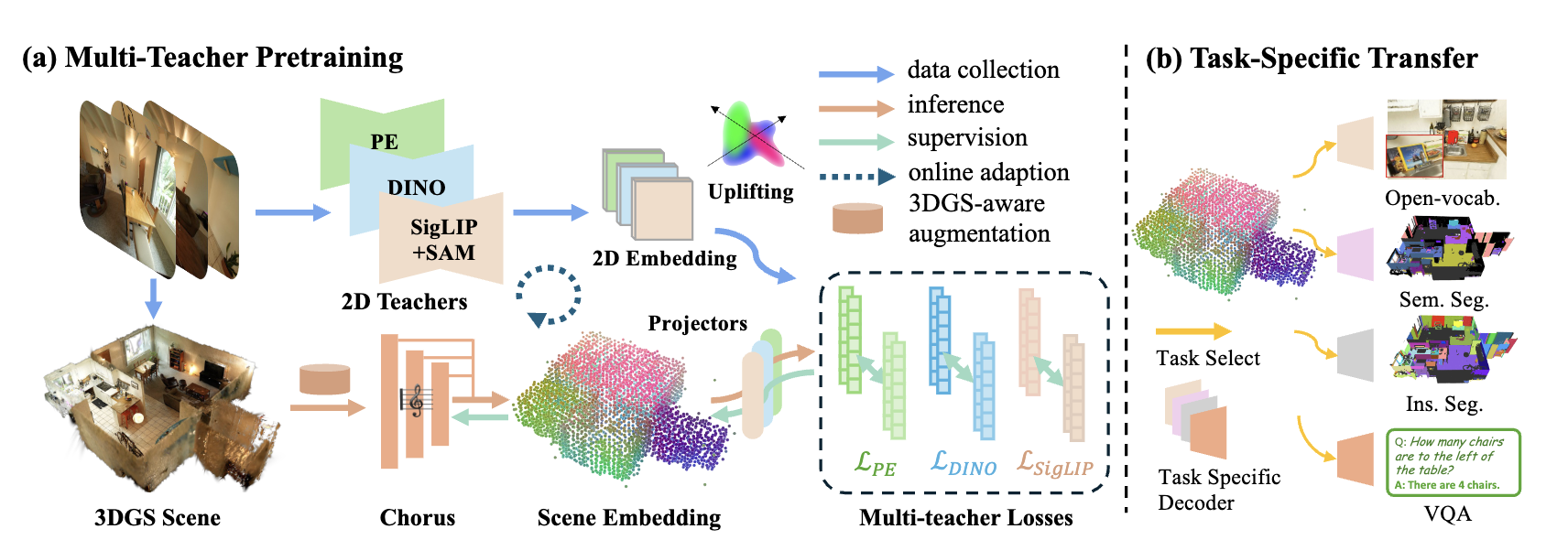
Yue Li*, Qi Ma*, Runyi Yang, Mengjiao Ma, Bin Ren, Nikola Popovic, Nicu Sebe, Theo Gevers, Luc Van Gool, Danda Pani Paudel, Martin R. Oswald Chorus introduces a powerful 3D Gaussian scene encoding. arxiv |
|
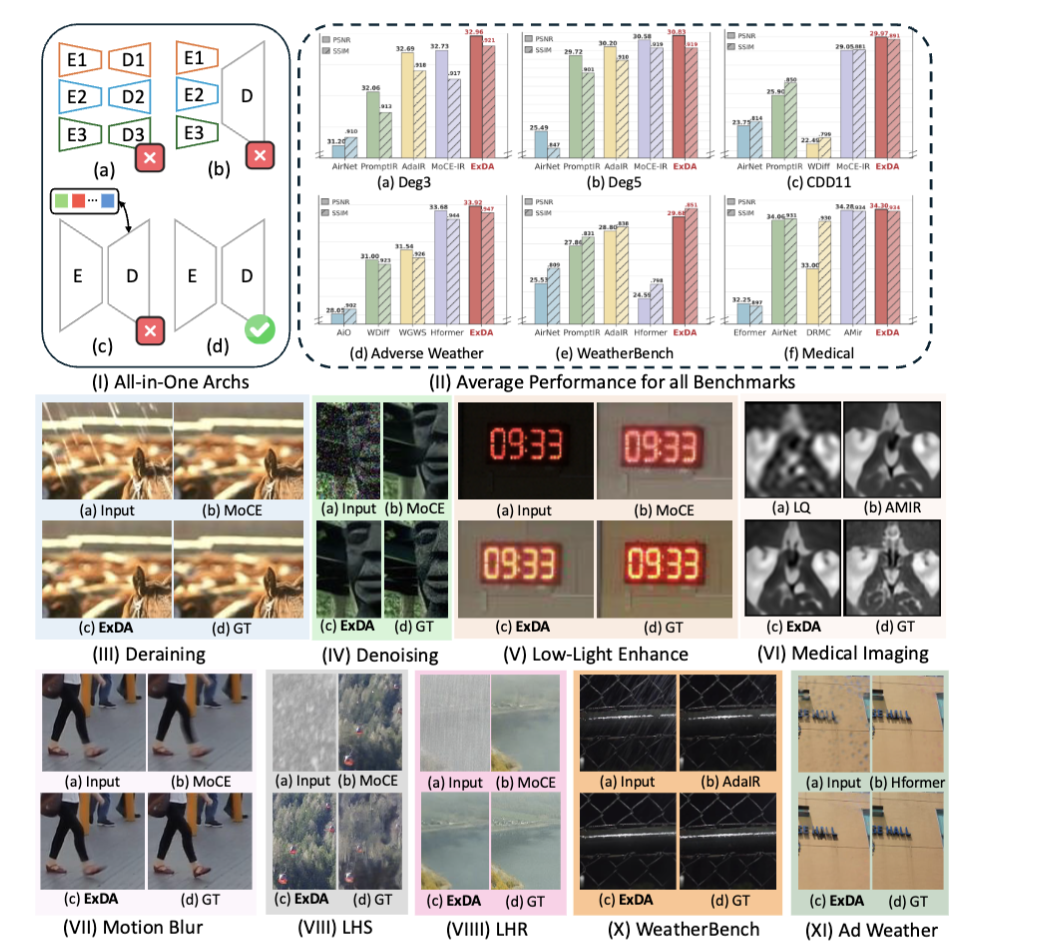
Runyi Yang*, Ren Bin*, Qi Ma, Xu Zheng, Mengyuan Liu, Danda Pani Paudel, Luc Van Gool, Rita Cucchiara, Nicu Sebe We revisit attention mechanisms for all-in-one image restoration and identify two bottlenecks in Restormer-style backbones: linear value paths limit expressivity and missing global slots hinder degradation context. We propose two minimal, backbone-agnostic primitives to address these issues. |
|
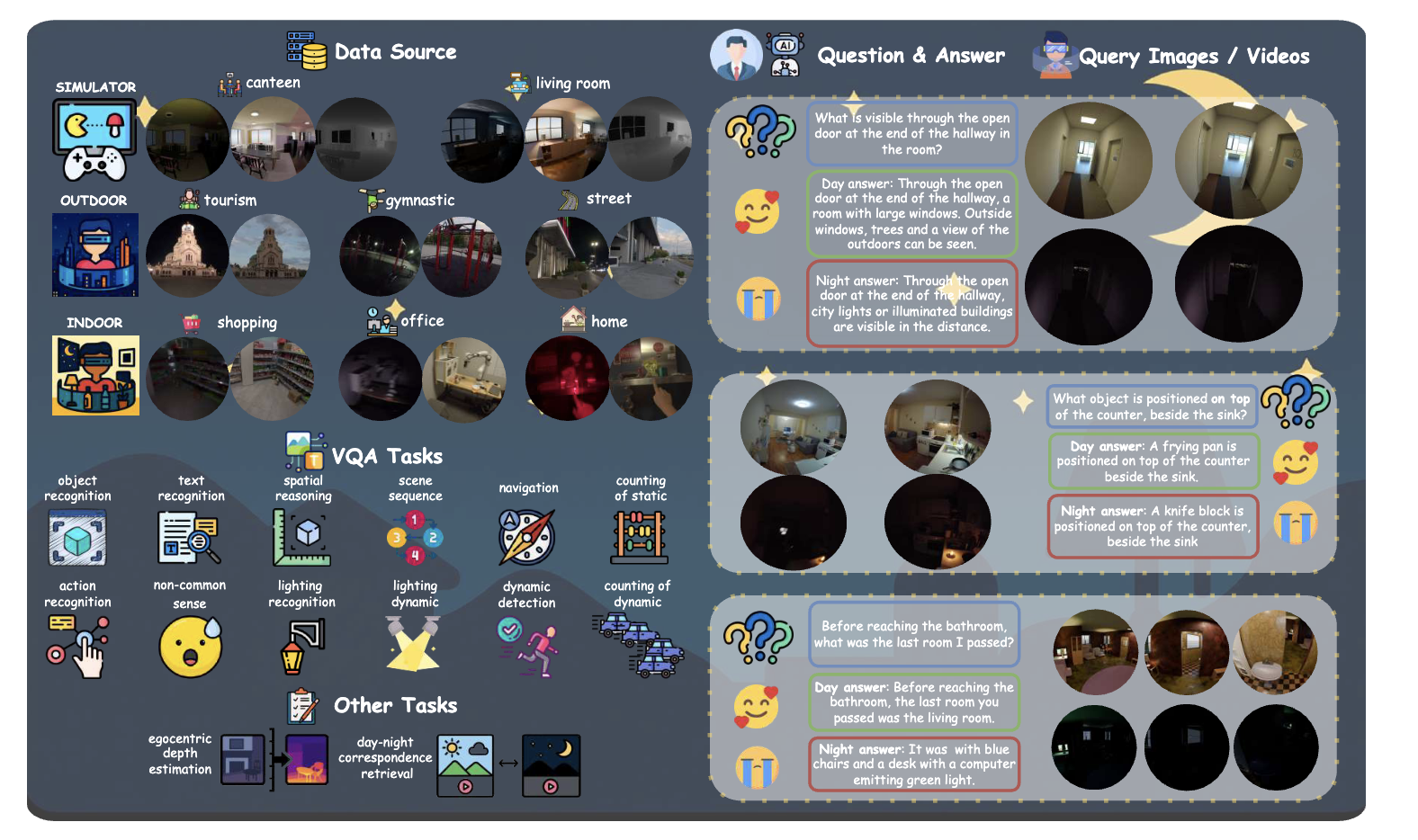
Deheng Zhang*, Yuqian Fu*, Runyi Yang, Yang Miao, Tianwen Qian, Xu Zheng, Guolei Sun, Ajad Chhatkuli, Xuanjing Huang, Yu-Gang Jiang, Luc Van Gool, Danda Pani Paudel EgoNight introduces a challenging benchmark for egocentric vision understanding in low-light nighttime conditions. arxiv |
|
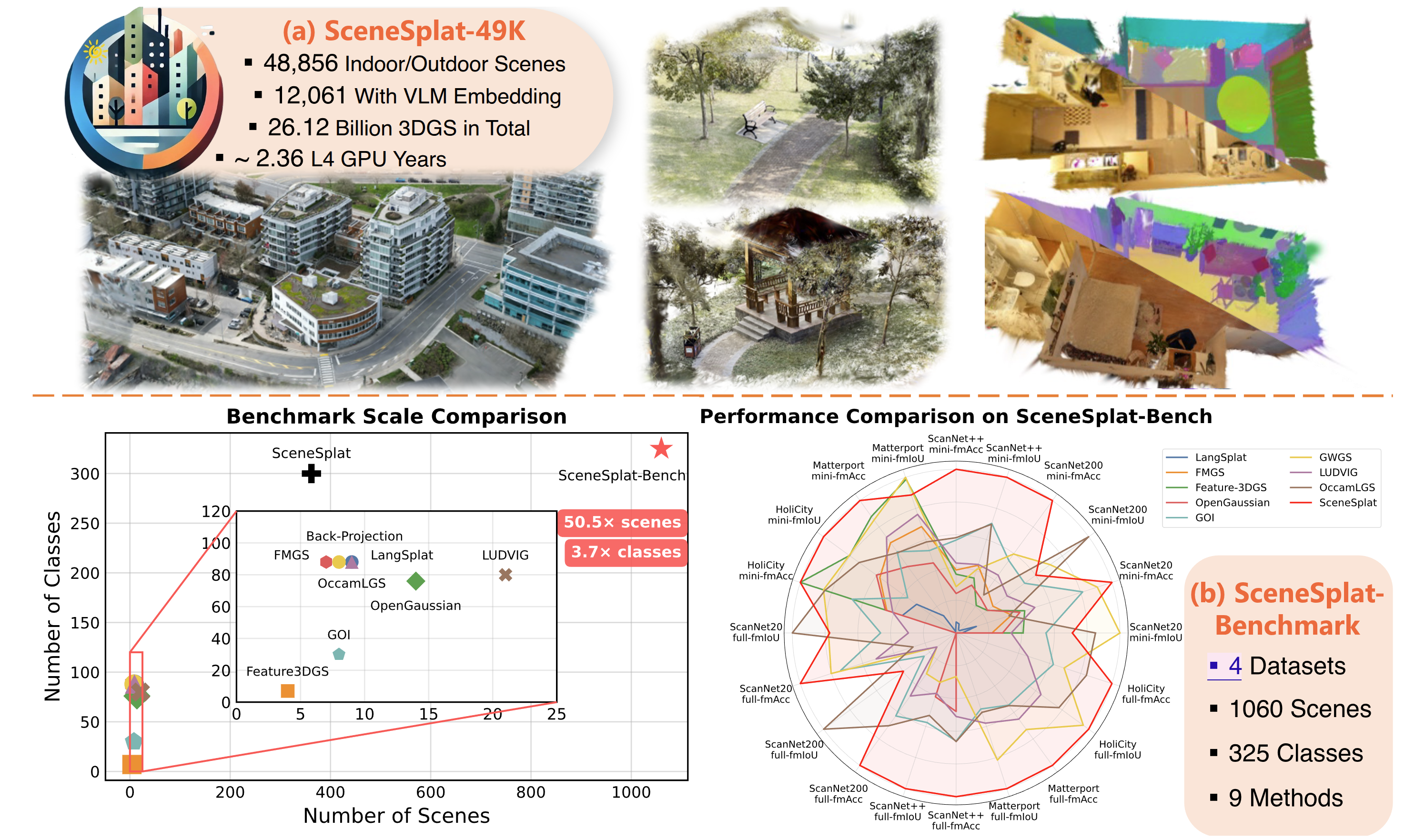
Mengjiao Ma, Qi Ma, Yue Li, Jiahuan Cheng, Runyi Yang, Bin Ren, Nikola Popovic, Mingqiang Wei, Nicu Sebe, Luc Van Gool, Theo Gevers, Martin R. Oswald, Danda Pani Paudel NeurIPS 2025 SceneSplat++ introduces a large-scale dataset and comprehensive benchmark for Language Gaussian Splatting, providing a robust evaluation framework for 3D scene understanding with language integration. arxiv |
|
|
Yue Li, Qi Ma, Runyi Yang, Huapeng Li, Mengjiao Ma, Bin Ren, Nikola Popovic, Nicu Sebe, Ender Konukoglu, Theo Gevers, Luc Van Gool, Martin R. Oswald, Danda Pani Paudel ICCV 2025 (Oral Presentation) SceneSplat is a novel framework for scene understanding that leverages Gaussian Splatting and Vision-Language Pretraining to generate high-quality 3D scene representations. Project homepage / arxiv / Code / Dataset |
|
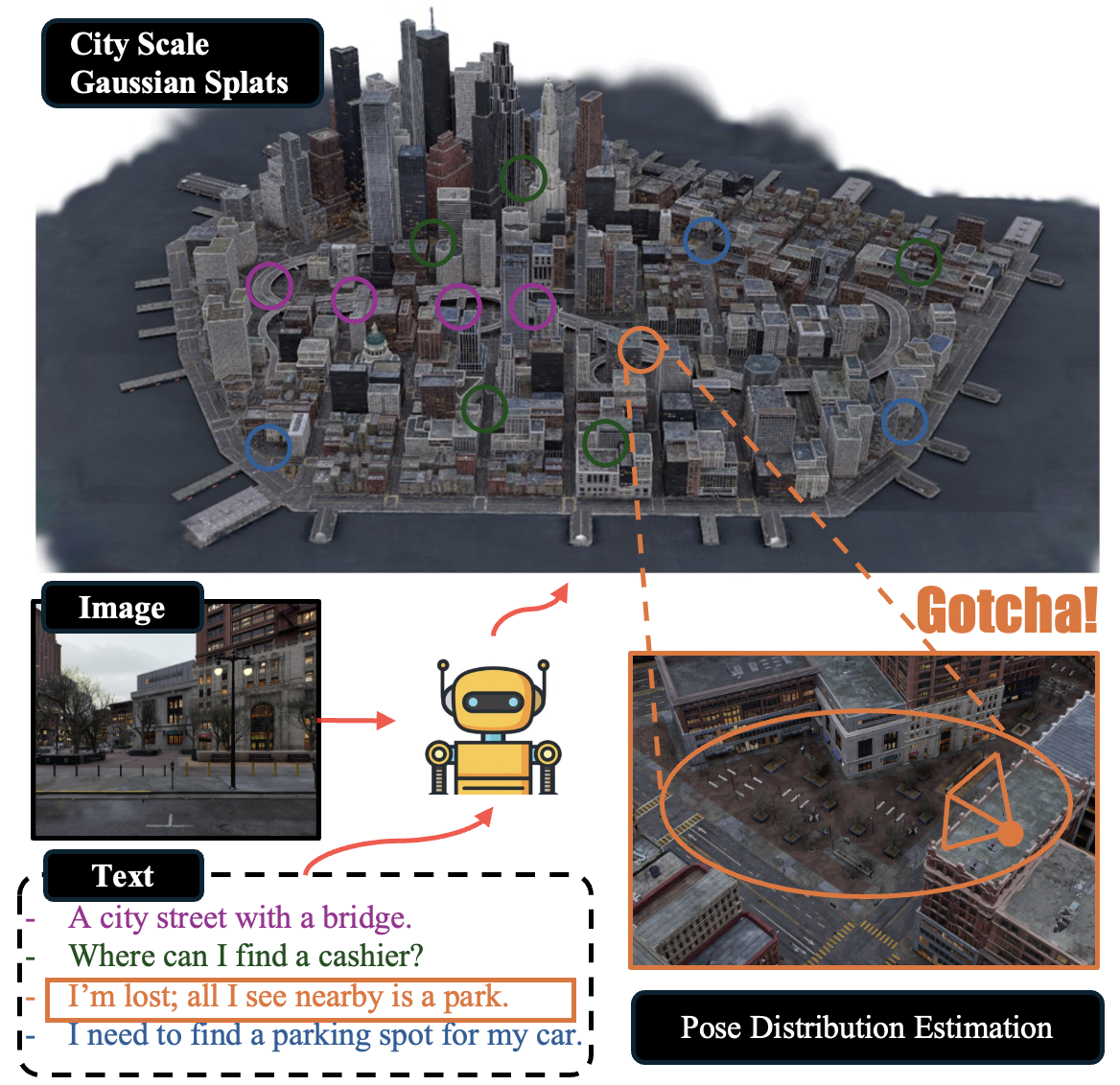
Qi Ma, Runyi Yang, Bin Ren, Nicu Sebe, Ender Konukoglu, Luc Van Gool, and Danda Pani Paudel Context-aware pose distributional localization. Given an ambiguous text description, our method accurately estimates the camera pose distribution across a large-scale urban environment. Project homepage / arxiv / Code |
|
Yuhang Zheng , Xiangyu Chen, Yupeng Zheng , Songen Gu, Runyi Yang, Bu Jin , Pengfei Li , Chengliang Zhong , Zengmao Wang , Lina Liu , Chao Yang , Dawei Wang , Zhen Chen , Xiaoxiao Long , and Meiqing Wang GaussianGrasper is a robotic system that uses 3D Gaussian Splatting and an Efficient Feature Distillation module to enable robots to grasp objects based on language instructions. Project homepage / arxiv / Code |
|
|
Runyi Yang, Zhou Jiang, Zhenxin Zhu, Baijun Ye, Yifei Zhang, Yuantao Chen, Hao Zhao We propose A newly proposed primitive pruning framework for Gaussian fields based upon the spectrum of primitive graphs; And A novel feature splatting and mixing module to compensate for the performance drop caused by the pruning; Reached state-of-the-art results, in terms of both quality and speed, on various benchmarks with low memory footprint. Project homepage / arxiv / Code |
|
|
Shi Yongliang*, Yang Runyi*, Li Pengfei, Wu Zirui, Feng Yixiao, Zhao Hao, Zhou Guyue† Knowledge-Based Systems 2023, IF 8.8 ScienceDirect / SSRN / arxiv / |
|
Zirui Wu, Tianyu Liu, Liyi Luo, Zhide Zhong, Jianteng Chen, Hongmin Xiao, Chao Hou, Haozhe Lou, Yuantao Chen, Runyi Yang, Yuxin Huang, Xiaoyu Ye, Zike Yan, Yongliang Shi, Yiyi Liao, Hao Zhao CAAI International Conference on Artificial Intelligence, CICAI 2023 (Best Paper Runner-up Award, 2 / 348) Project homepage / arxiv / Code GitHub |
|
• Reviewer @ Knowledge-basd System |
|
• Outstanding Graduate of Beijing Institute of Technology |
